Документация и
примеры
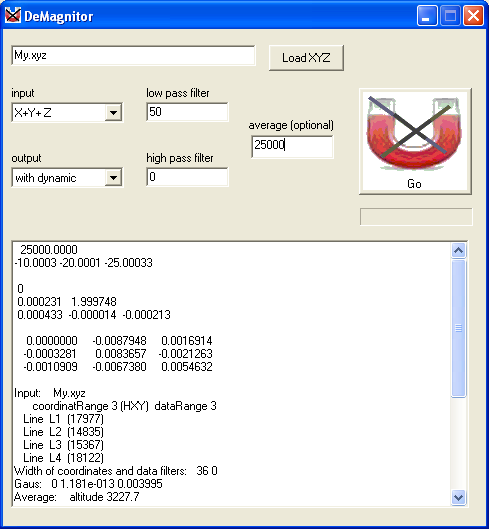
Программа компенсации Программа доступа для опробования, или может стать доступны для опробования, если отправить запрос на почту.
Результат запуска программ в файле outFly.txt, там же записаны параметры, с которыми ее запускали. Актуальным является параметр low pass filter – оптимальное значение 3÷4 длинны (в отсчетах) эволюций самолета в калибровочном полете.
high pass filter и average можно не заполнять. Первый нужен только при наличии синхронных помех по феррозонду и квантовому датчику, второй нормализация, которая не актуальна. Скомпенсированное значение не представляется гладкой кривой. Хотя влияние ориентации самолеты отсутствует, перемещения самолета, конечно, оказывают влияние.
Так должен выглядеть результат с учетом вертикального градиента. Специфика этой задачи в том что полет происходит в неизвестном поле и это затрудняет оценку качества компенсации.
Достоверно качество может быть определено только в точках пересечения маршрутов. Метод.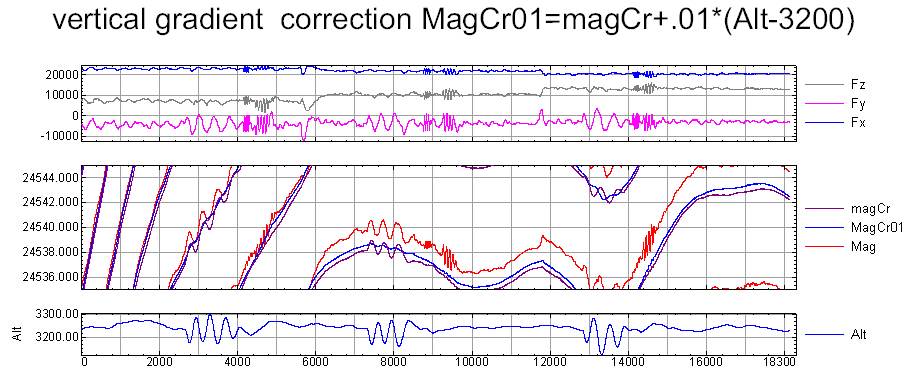
одна из линий
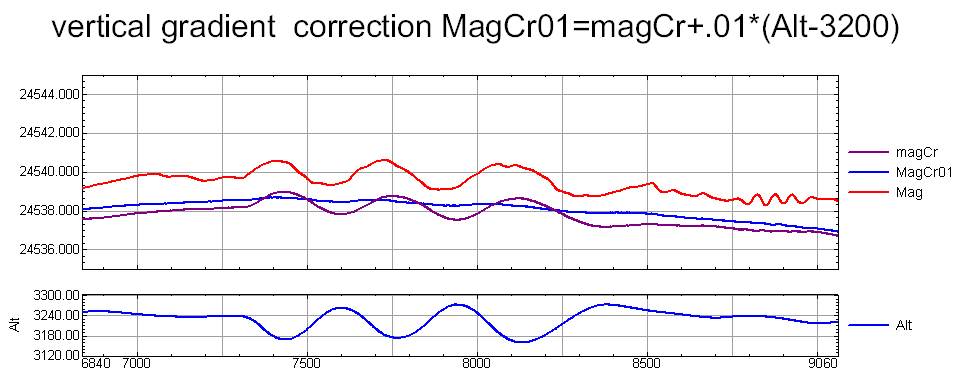
зум - тангажные эволюции
Применяются 2 типа датчиков – точные и неточные. Точный называется квантовый,
неточный феррозондом. Неточный в отличии от точного измеряет вектор. Точности
примерно 10.4 и 10.8. Про принципы можно посмотреть например здесь
квантовый
магнитометр ,
феррозонд или
http://ya.ru/.
Итак нам нужно измерить магнитное поле в какой-то точке, пролетая ее на
самолете. При этом магнитное поле земли примерно 50000 nt (от полюса к экватору
меняется в 2 раза), а самолета примерно 10. Вообще влияние самолета состоит из 3
компонент. Первое это самолет как постоянный магнит, второе это мягкая
компонента и третья динамическая – влияние токов Фуко. Вторая меньше первой, а
третья вообще очень мала. Единственная возможность как-то вычислить эти
компоненты - произвести пробный полет. Проблема в том что магнитное поле
привязано к конкретным точкам и переменно по времени– так называемые вариации.
Карты магнитного поля не дают абсолютных значений. Вместе с тем от
магниторазведки требуется очень большая точность поскольку применяется для
изучения строения пород, которые в обыденном понимании совершенно не магнитны.
Задача в том чтоб вычислить влияние самолета на точный датчик, основываясь на
данных одного вылета. Обычно этот вылет состоит из 4 маршрутов, летанных в
разных направлениях. А потом можно летать по площади и строить карты.
История
Впервые я столкнулся с этой задачей в начале 90-х. Проводился международный
тендер на магнитную съемку. Уже точно не помню на нефть или на газ и был это
Сахалин 1 или 2 или просто Сахалин. А какие-то данные у нас имелись. Быстренько
наваял программку – что-то вроде метода наименьших квадратов, Только
оптимизировал не сами значения, а первые разности. Программа работала, но
результат отличался, если вводились маршруты по отдельности или все скопом. То
есть такой результат нельзя было считать удовлетворительным. К тому же
существовала программа которая считалась отраслевым стандартом. Вот ее
потомок. Купили эту программу с
удивлением обнаружил, что компенсация идет по разным направлениям отдельно и
никакого равенства уровней по разным направлениям не предполагается. Такое
нисхождение называется девиацией. Геофизики борются с этим специальным
уравниванием, летая встречные и поперечные маршруты. Если сходить в
http://search.yahoo.com/search?p=AEROMAGNETIC+COMPENSATOR,
то выясняется что сейчас есть еще одна альтернатива
AADCII
- якобы очень хитроумный алгоритм придуманный в 60-х годах для подводных лодок.
Здесь сделан правильный вывод об том, что для компенсации необходимо брать все
данные. Дело в том, что поправку можно представить как функцию на сфере, и если
придерживаться одного направления то можно точно определить только наклон
поверхности и кривизну. Подозрительным в этой программе является то, что
игнорируется высота, якобы за ненужностью, хотя перепады высот при маневрах
составляют 100м что соответствует более 1nT на экваторе. Все коэффициенты
хранятся в бортовом компенсаторе, и даже их состав не описан. Средства пост
обработки и контроля отсутствуют, “за ненужностью”.Количество параметров 30 –
мне представляется это чрезмерным. Чем больше параметров тем точнее точность
аппроксимации, но точность интерполяции меньше.
Влияние боковых эволюций и изменений скорости меньше вертикальных эволюций, но
они также вносят свой вклад. То есть если величина прогиба меньше 1 nT, то для
оценки погрешностей нужно знать вертикальный градиент и карту магнитного поля.
Коэффициент улучшения это результат деления погрешности на исходную
намагниченность самолета, он имеет большее отношение к грязности борта, чем к
программе компенсации. У Pico Envirotec этот термин вообще не упоминается.
Программа.
Мною была разработана программа, особенностью программы является использование
2-х фильтров, разной длинны. Первый фильтр отделяет пространственную компоненту
магнитного поля от маневров самолета, второй необходимо использовать если
имеются коррелированные высокочастотные помехи по феррозонду и квантовому
датчику. Длинны фильтров измеряются в отсчетах. Программа абсолютно
нечувствительна к постоянным градиентам в 3-х направлениях. Если взять
правдоподобные магнитные поля, то есть 1 – 2 перегиба магнитного поля по
маршруту с похожими амплитудами, а траекторию из реального полета, то в
результате математического моделирования при применении оптимальных фильтров,
получается погрешность 0.001 nT. Можно взять более короткие фильтры и получить
точность 0, но обусловленность системы при этом падает. Другими словами, хотя
точность выше чувствительность к помехам больше, и для реальных данных не может
быть рекомендовано уменьшение длинны фильтра. Другими словами погрешность
определяется неравномерностью окружающего поля, и не зависит от самого жесткого
вектора, то есть понятие коэффициент улучшения в данном случае бессмысленно.
Возможно переменная размерность входных и выходных данных. То есть, возможны
режимы учета не только вертикальных, но и горизонтальных градиентов. Разумеется,
никакие предварительные значения градиентов не нужны, просто задаются
координаты. И выходная размерность тоже переменна. На выходе можно получить
только жесткую компоненту, жесткую с мягкой и все 3. Все комбинации доступны –
на входе 0, 1 или 3 координаты, на выходе 3 варианта. Для статистики выдается
вертикальный градиент.
Результаты.
Программа почти 2 года используется на 5 различных бортах. Построены карты Для
компенсации использовались стандартные маневры. Точность компенсации проверялась
и по коэффициенту улучшения и по девиации. Девиация является стандартным
критерием для выносных гондол и производители датчиков также гарантируют
абсолютную точность. Во всех случаях остаточная девиация после компенсации была
меньше 1nT. Всегда применялась полная модель, с 3-мя координатами и динамической
компонентой, которая была ничтожна. Полученный вертикальный градиент
соответствовал истинному. На одном из бортов было установлено мощное
оборудование и полеты проводились в ночное время с включенным оборудованием
(магнитометрия была не основным методом). Несмотря на это компенсация сработала
нормально. На одном из бортов исследовалось влияние руля поворота на стоянке.
Полный поворот руля вносил влияние ± 0.4 nT . Несмотря на это, по отзывам
геофизиков карты получились лучше чем с гондолой. . Хоть точность в 100 раз
меньше чем на моделях, но надо понимать, что это относится к точности жесткого
вектора, а не к самим погрешностям. Руль поворота на маршруте используется
слабо. Так что магниторазведку с жестким креплением вполне можно использовать.