Магнитная компенсация
На борту установлено два датчика магнитного поля. Квантовый магнитометр измеряет значение модуля магнитного поля с высокой точностью, а феррозондовый измеряет вектор магнитного поля, но с точностью гораздо меньшей. Квантовый датчик может работать только при ограниченных наборе направлений магнитного поля. Существуют три зоны где квантовый датчик не работает это два полюса и экватор. При полете на полюсе поле вертикально и системе самолета не зависит от курса, поэтому если датчик установлен в допустимом положении то самолет может лететь любым курсом. При полете на экваторе возможен полет в четырех, взаимно перпендикулярных направлениях при этом ось магнитометра направляется под углом 45 градусов к направлению магнитного поля. Другими словами при полете на экваторе без переориентирования датчика возможен только полет по рядовым и секущим маршрутам. При установке датчика кроме направления маршрутов нужно также учитывать склонение.
Жесткая компонента
Самолет вносит три типа искажений магнитного поля. Первое называется жесткой компонентой магнитного поля, это просто постоянная векторная добавка. Основной вектор может менять направление в координатах самолета, при этом, ввиду относительной малости добавки, удлинение вектора практически равно проекции жесткого вектора на направление основного. Если отнормировать (сделать длину равной 1) показания векторного магнитометра на единицу, то эта поправка равна скалярному произведению вектора собственного намагничения на нормированный вектор феррозонда.
Мягкая компонента
Мягкая компонента возникает в результате воздействия магнитного поля на детали самолета и зависит от направления внешнего магнитного поля. В точке монтирования квантового датчика возникает дополнительное магнитное поле, которое описывается матрицей 3x3. Это магнитное нужно помножить на направление основного чтобы получить его вклад в длину результирующего вектора. В результате получится квадратичная форма. Представим эту форму в виде матрицы 3x3, у которой наддиагональные элементы равны нулю. Мы не можем различить X*Y от Y*X и можем искать их только вместе. Таким образом, получается 6 коэффициентов. Удобней опять воспользоваться нормированным вектором феррозонда , тогда поправку будет пропорциональна полю, или измеренному значению квантового датчика. Таким образом коэффициенты приобретают наглядность и физический смысл, а при применении нужно помножить на поле в точке и поделить на среднее в момент компенсации. (разностью между истинным и измеренным пренебрегаем).
Допустим квантовый датчик окружен равномерным сферическим экраном, который уменьшает значение магнитного поля по всем направлениям одинаково. Ясно что выполняя любые эксперименты мы не сможем определить коэффициент экранирования. Другими словами самолеты после компенсации сводимы друг к другу только с точностью до некоторого коэффициента близкого к 1. Да самолеты уже и так разные, уже потому что в счетчиках разные опорные кварцы. Поэтому мы должны задаться каким-то дополнительным условием. Я предполагаю что поле в направлении оси X истинно и поправка равен 0. Итого остается 5 коэффициентов.
Динамическая компонента
Динамическая компонента это магнитное поле от токов, которые возникают при вращении самолета в магнитном поле земли (токов Фуко). Она значительно меньше предыдущих. Значения динамической компоненты матрица 3x3. Опять используется нормированный феррозонд и значит полученные значения нужно приводить к действующему магнитному полю. Размерность (физический смысл) этой матрицы – поправки которые действуют при вращении самолета со скоростью один радиан за отсчет. Предполагается что магнитное поле по величине меняется не очень быстро. Можно сказать что динамическая компонента возникает при вращении в координатах самолета вектора постоянной длинны (к тому же мы пользуемся нормированным вектором). Тогда величина X2+Y2+Z2 постоянная и ∂X*X+∂Y*Y+∂Z*Z==0. Диагональные элементы матрицы связаны этим соотношением и, поэтому из них можно определить только 2. Третий коэффициент может быть учтен в этих 2. Левый верхний элемент я исключаю из расчетов и принимаю равным 0. Если разности феррозонда вычислять при другом шаге по времени то динамические коэффициенту нужно поправить. Отличие динамической компоненты от остальных, в том что здесь размерность поделена на радианы за отсчет. Слава Богу самолет с такой скоростью не вращался. Тоесть десятки или даже сотни в значениях вас не должны смущать. Вы можете вывести динамическую компоненту отдельным каналом и тогда увидите что она не большая.
Помехи
Это электрический шум на борту, грозы, магнитные вариации, нестабильность опорного кварца счетчика магнитометра. Влияние рулей поворота можно наблюдать на земле. На одном из бортов оно составляло 0.4 нт. Перед вводом в программу точечные отскоки необходимо почистить стандартными средствами геософта. Для получения координат необходимо использовать дифференциальный GPS.
Работа с программой
Входной текстовый файл имеет формат gesoft XYZ. Содержит значения квантового датчика, три значения феррозонда и три координаты. Файл может содержать любое количество линий. Заголовки Line прочитываются и выводятся для статистики. Разрывом линии считается любая строка, которая не содержит 7 чисел.
Необходимо выбрать сколько координат мы хотим использовать. Возможен режим вообще без координат, но во всех случаях необходимо наличие чисел 7-ми колонках. Возможно отказаться от расчета динамической компоненты, или от расчета динамической вместе с мягкой.
Программа работает с локальными данными, тоесть перемещение любой линии или изменение уровня никакого влияния на результат не окажет. При этом задаются длинны 2-х фильтров. high pass фильтр можно задавать 0, если нет коррелированных помех по обоим датчикам. Low pass фильтр производит отделение аномального магнитного поля от влияния эволюций.
На выходе получаем коэффициенты и некоторые статистики. Коэффициенты даны в виде таблицы и в виде выражения для геософта. В выражении используются нормированные на 1 значения феррозонда и их разности. Скрипт для их вычисления. (приложен к примеру вместе с шаблонами для ввода и вывода.). Также выводится некоторый вертикальный градиент. Это некоторое значение для контроля, алгоритм не предполагает постоянного градиента.
Оценка результатов
Программа применялась на 5 бортах в течении 2-х лет. Приложенный файл - типичный файл сырых данных без поправок на вариации, разреженный для экономии места. Если произвести магнитную компенсацию приведенного файла, то можно видеть влияние высоты на значения магнитного поля. Влияния горизонтальных перемещений на глаз не заметны, но они тоже должны присутствовать. Если сравнить графики скорректированного и не корректированного значения то кажется что где-то компенсация сработала, а где-то нет. Но если ввести поправку +(Alt-3000)*0.011 то получится совсем другая картина. Поскольку программа учитывает перемещения в пространстве в результате должно присутствовать влияние эволюций. Влияние эволюций это не только движения вверх вниз, но и боковые перемещения и изменения скорости. Другой метод оценки качества это девиация при пролете одной точки в разных направлениях. После компенсации списания вариаций и поправок за высоту девиация составляла меньше 1 нт. В эту величину также входят различные погрешности, в частности удаленность базовых станций. Не возможно оценить какая на самом деле погрешность, но можно легко провести численный эксперимент. В примере приведено выражение. Здесь сразу вычисляется искаженное поле. Мы оцениваем точность коэффициентов. Если оценивать точность компенсации то нужно также записать исходное поле, но в этом нет необходимости. Результат компенсации приведен на скриншоте. Мы видим отличие от исходных коэффициентов на 0.0001. Отношение исходного, жесткого вектора к остаточному составляет 100000. Если колебания направления 0.1 радиана то колебания остаточного жесткого вектора на маршруте 0.00001. Отношение колебаний остаточного жесткого вектора на маршруте к жесткому вектору 1000000. Функция из примера самая обычная, она имеет подобные значения и размах, что и естественное поле. Разумеется, если задать например синус с частотой близкой к эволюциям самолета то результат будет гораздо хуже. Просто не будет никаких предпосылок, чтоб отфильтровать аномальное магнитное поле.
Low pass filter
В выходных данных есть такое значение Gaus=0.1e-13 этот параметр показывает обусловленность решения. Чем он больше тем надежней решение и тем меньше влияние помех. Также решение по 4-м направлениям более надежно. Но вместе с тем, ни какое конкретное значение гаус я не могу рекомендовать. Увеличить гаусс можно путем увеличения параметра low pass filter. С другой стороны этот параметр повышает влияние окружающего поля. Я бы рекомендовал длину фильтра в полтора, 2 раза больше чем длинна эволюций. Тоесть для приведенной траектории надежней брать длину 500 а не 50. Нужно понимать эту ситуацию – у нас нет никакого контроля за правильностью работы компенсации. Figure of merit может показать что-то только если у все очень плохо. В конечном итоге геофизик видит результат только тогда когда построит карты. По отзывам геофизиков полученные маршруты имели изначально незначительную девиацию и после незначительного уравнивания получился отличный результат.
Программа компенсации
Программа доступа для опробования, или может стать доступны для опробования, если отправить запрос на почту. Результат запуска программ в файле outFly.txt, там же записаны параметры, с которыми ее запускали. Актуальным является параметр low pass filter – оптимальное значение 3÷4 длинны (в отсчетах) эволюций самолета в калибровочном полете. high pass filter и average можно не заполнять. Первый нужен только при наличии синхронных помех по феррозонду и квантовому датчику, второй нормализация, которая не актуальна.
Скомпенсированное значение не представляется гладкой кривой. Хотя влияние ориентации самолеты отсутствует, перемещения самолета, конечно, оказывают влияние. Так должен выглядеть результат с учетом вертикального градиента.
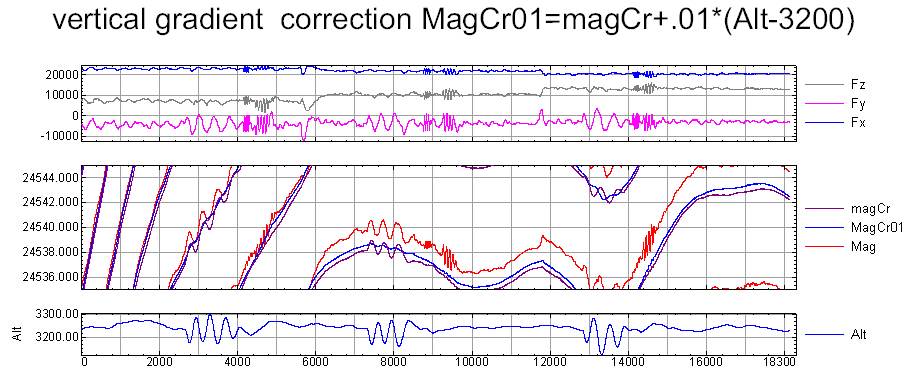
одна из линий
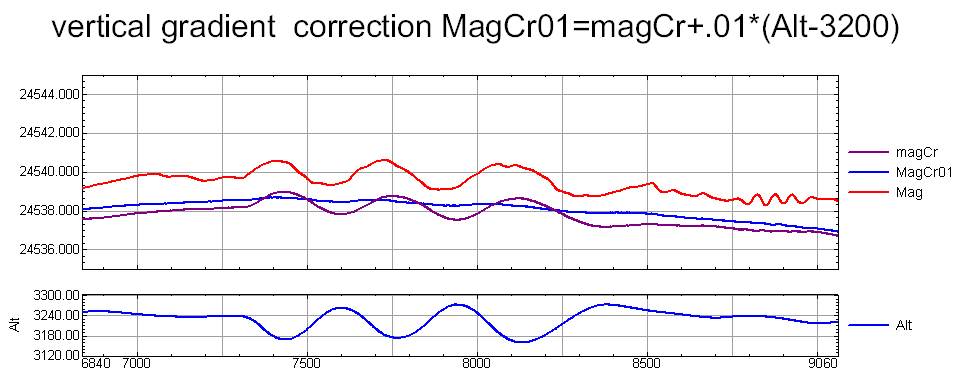
зум - тангажные эволюции
Специфика этой задачи в том что полет происходит в неизвестном поле и это затрудняет оценку качества компенсации. Достоверно качество может быть определено только в точках пересечения маршрутов.